Instantaneous Velocity Doppler Radar Device
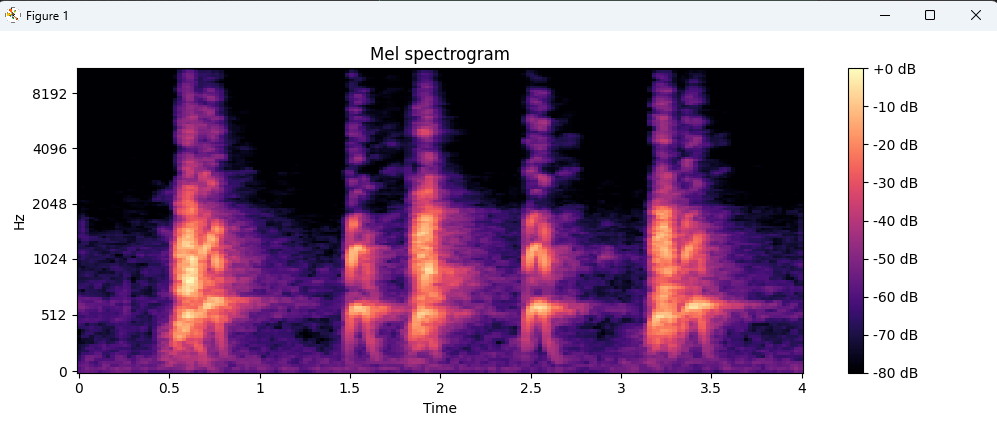
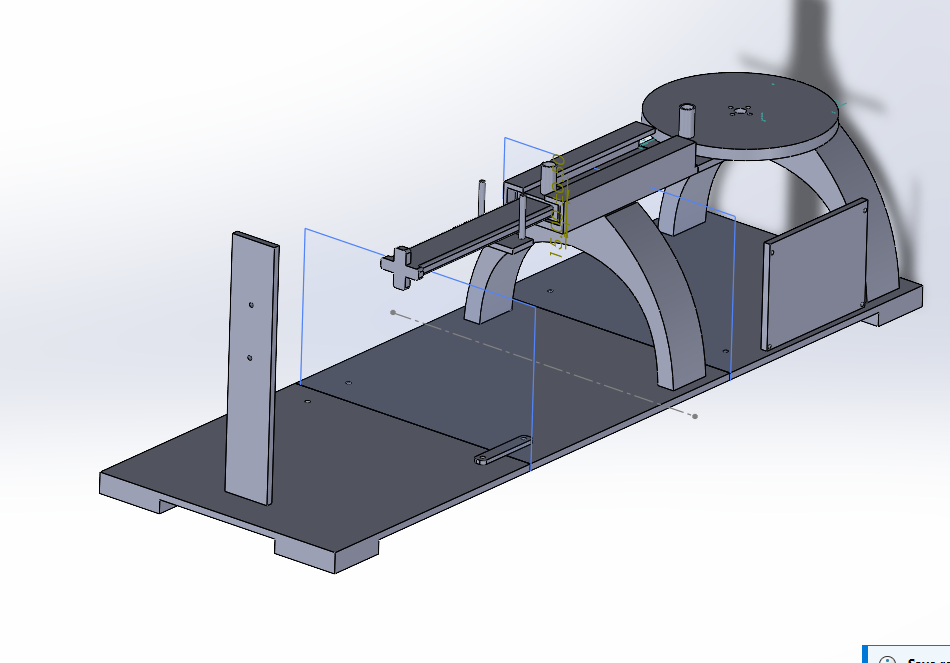
A stationary HB100 Microwave Sensor is mounted in front of an aluminum deflector that moves back and forth in a linear motion. The disk incorperates magnets and a stationary hall sensor beaneath it to be able to calculate RPM. As the deflector moves back and forth in front of the HB100 sensor, the emitted microwaves are stretched or compressed. An oscilloscope can display the instantaneous shifts in frequency (and therefore instantantanous velocity can be calculated) at specific crank angles.
- Mechanism — 3D printed crank–slider (disk + rod) back-and-forth deflector motion
- Deflector — Aluminum structure that moves back and forth in front of the HB100 sensor
- RPM Calculation — magnets under disk; Hall + reference Hall for rotation phase
- Data Collection — oscilloscope on HB100, Hall, and reference Hall; ESP32 RPM calculation